La tecnología abre muchas posibilidades para aplicaciones industriales y sociales en beneficio de personas con discapacidad
Controlar robots con la mirada ya es posible gracias a una nueva tecnología desarrollada por la multinacional suiza ABB y la compañía española Irisbond, que abre un abanico ilimitado de posibilidades para todo tipo de aplicaciones industriales y sociales, en el ámbito de la discapacidad.
La presentación de este novedosa tecnología, desarrollada bajo el paraguas del programa Bind 4.0 del Gobierno vasco (norte de España) para fomentar la colaboración entre empresas ya asentadas y emergente, se desarrolló hoy a través de la disputa de una partida de ajedrez entre dos mujeres.
Una de ellas, en silla de ruedas debido a una grave discapacidad de movimientos, estuvo asistida por un robot al que ordenaba realizar distintos movimientos de piezas con la mirada.
Algo posible mediante un ordenador en cuya pantalla aparecía un tablero de ajedrez sobre el que la mujer posaba la mirada para indicar la pieza que deseaba mover y en qué escaque depositarla.
El robot, situado en medio de la mesa y dotado de dos brazos articulados similares visualmente a los de las máquinas quirúrgicas de precisión, movió así varias piezas e incluso se comió la reina de su oponente.
La máquina, que tiene en su memoria las reglas de ajedrez y que no permite realizar movimientos prohibidos en el juego, controla también las acciones de la persona que no sufre discapacidad, quien le ha indicado mediante un ratón los desplazamientos de sus fichas.
Una vez concluida la partida, el robot se ha encargado de recoger las piezas y posicionarlas nuevamente en su correspondiente casilla inicial.
Una tecnología denominada “eye-tracking” que podría permitir a un cirujano consultar con la mirada el historial de un paciente mientras le está operando, o a un conductor descolgar el teléfono de su coche al recibir una llamada con solo un movimiento de sus ojos.
La solución desarrollada ahora está basada en un software denominado “webtracker” que permite el control de ordenadores con el movimiento de los ojos, monitorizados a través de una webcam, y que utiliza sofisticados algoritmos basados en el posicionamiento de la cara y de la visión para permitir a los usuarios interactuar con el robot y controlarlo de una forma natural.
Esta investigación abre un amplio campo de posibilidades para nuevas aplicaciones de robótica industrial, especialmente en la “robótica colaborativa”, incluyendo nuevas opciones de integración laboral para personas con discapacidad.
El objetivo de Feel es crear experiencias sensoriales para aquellos con alguna limitación física
Juan Antonio Fuentes, arquitecto de 29 años, lleva varios años estudiando las posibilidades que ofrece la realidad virtual. “Esta tecnología podría servir para que aquellas personas con discapacidad disfrutaran de vivencias de un modo virtual que, por sus limitaciones físicas, no pueden llevar a cabo. Por ello he ideado Feel”, dice. “Estoy en proceso de desarrollo de una plataforma web en la que los usuarios puedan descargarse este tipo de contenidos y disfrutarlos en su casa con unas gafas adaptadas. Por ejemplo, experiencias de buceo o de paracaidismo. El objetivo es que una lesión, por muy grave que sea, no impida a alguien experimentar este tipo de entretenimiento, aunque sea de un modo virtual”, añade Fuentes.
El modelo de negocio que plantea Fuentes es proporcionar una serie de paquetes con diferentes acciones y que los usuarios paguen por descargárselas. “Si alguno quiere una experiencia en concreto que no aparece en las ya disponibles, Feel podría generarla de forma personalizada. Aunque tendrá un coste superior. Todavía no he pensado en los precios”, asegura.
No existe una fecha de lanzamiento pues Fuentes se encuentra en búsqueda de financiación. “Dispongo de los medios y el conocimiento para desarrollar Feel. Solo necesito una inyección económica”, concluye.
La nueva técnica posibilita una rehabilitación más rápida y eficaz de la deambulación en pacientes que han sufrido un ictus o una lesión medular
La mayoría de pacientes que sobreviven a un ictus presentan algún tipo de discapacidad residual – ARCJean-Baptiste MignardotHIVO
El ictus o accidente cerebrovascular constituye una de las primeras causas de discapacidad en todo el mundo. De hecho, la gran mayoría de los 300.000 pacientes que, solo en nuestro país, han sobrevivido a un ictus presenta algún tipo de discapacidad residual, caso de la pérdida de la capacidad para caminar. En consecuencia, y una vez sufrido el episodio, los afectados se ven abocados a pasar largas jornadas sobre una cinta de andar para recuperar la deambulación. Una terapia rehabilitadora que requiere una enorme inversión de tiempo y energía pero que no siempre ofrece resultados satisfactorios. Y es que contrariamente a como sucede al caminar sobre una cinta, en la ‘vida real’ hay cambios de direcciones, de superficies y de velocidad de la marcha. Es decir, hay muchas fuerzas gravitatorias en juego. De ahí la importancia de un nuevo estudio llevado a cabo por investigadores de la Escuela Politécnica Federal de Lausana (Suiza), en el que se describe un nuevo método que posibilita una recuperación mucho más rápida y eficiente de la capacidad de caminar en pacientes que han sufrido un ictus y otras lesiones neurológicas, incluidas las lesiones medulares.
Como explica Jean-Baptiste Mignardot, director de esta investigación publicada en la revista «Science Translational Medicine», «la recuperación de la deambulación tras un trastorno neurológico requiere una ‘reprogramación’ de la interacción entre los mecanismos corporales y las fuerzas gravitacionales. Pero a pesar de la importancia de las interacciones de la locomoción dependientes de la gravedad, estos componentes esenciales en la rehabilitación de la deambulación han recibido, por lo general, una atención mínima. Por ello, hemos diseñado un algoritmo adaptativo que personaliza las fuerzas multidireccionales aplicadas al tronco al caminar en función de los déficits motores específicos de cada paciente».
Fuerzas gravitatorias
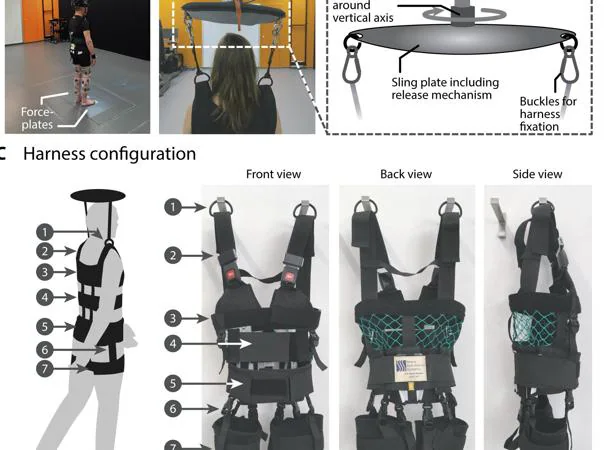
En la actualidad, muchas de las terapias rehabilitadoras que se emplean para la recuperación de la capacidad de deambulación tras un ictus o una lesión medular incluyen un arnés que corrige la posición del tronco superior mientras el paciente camina sobre una cinta de andar. Un arnés rígido cuyo único propósito es enderezar el tronco y que no tiene en cuenta los cambios de dirección o de ritmo durante la deambulación. Quizás porque no hace falta: la dirección en la cinta siempre es la misma. Y el ritmo de marcha, por lo general, también.
Pero, ¿qué pasa si el paciente, tal y como ocurre en el mundo real, quiere, por ejemplo, ir hacia atrás o hacia los lados? En estos casos, las fuerzas de la gravedad tienen un efecto que debe ser compensado por la posición del tronco. Lo cual no puede llevarse a cabo si el arnés es rígido.
Para solventar este problema, los autores han diseñado un arnés robótico que contrarresta las fuerzas gravitatorias sobre el tronco mientras los pacientes caminan hacia delante, hacia atrás o lateralmente. Y dado que los usuarios presentan problemas motores derivados de sus lesiones neurológicas, los autores también han desarrollado un algoritmo que ajusta individualmente la posición del arnés en función del déficit motor de cada paciente.
Es más; el sistema está controlado por una red neural artificial que varía las fuerzas aplicadas sobre el arnés mediante un cable y a partir de la información de más de un centenar de variables relacionadas con el movimiento corporal.
Pero este arnés robótico, ¿funciona? Pues sí. Los resultados de este estudio, llevado a cabo con 26 pacientes en rehabilitación tras un ictus o una lesión medular, mostraron que los participantes que requerían apoyo para caminar lo hacían de una forma totalmente natural y con unas capacidades motoras similares a los de los individuos sanos gracias al arnés robótico. Y en los casos en los que los pacientes podían llegar a caminar sin ayuda, el arnés mejoró el equilibrio, la coordinación de extremidades y la colocación del pie al pisar.
Aún habrá que esperar
En definitiva, parece que el nuevo arnés robótico –y su algoritmo– es más efectivo que los arneses rígidos a la hora de procurar la recuperación de la deambulación tras una lesión neurológica. De hecho, una hora de entrenamiento sobre el terreno con el arnés y el algoritmo conllevó importantes mejoras en la capacidad para caminar sin ayuda en cinco pacientes con lesión medular, mientras que el andar sobre una cinta durante el mismo periodo de tiempo provocó que uno de los sujetos experimentara un empeoramiento real y objetivo de su locomoción.
Como indican los autores, «nuestros resultados ponen de relieve la importancia del apoyo preciso del tronco para proporcionar protocolos de rehabilitación de la marcha y establecer un marco práctico para aplicar estos conceptos en la práctica clínica rutinaria».
Y esta nueva tecnología, ¿cuándo estará disponible para su uso por los pacientes? Pues aún habrá que esperar. Como concluye Jean-Baptiste Mignardot, «a día de hoy ya estamos llevando a cabo un ensayo clínico utilizando esta estrategia de asistencia robótica para la rehabilitación de pacientes con lesiones medulares».
Un desarrollador muestra las posibilidades de un ‘software’ para adaptar sin modificar los controles físicos de la realidad virtual a personas con movilidad reducida
En su definición simplificada, la realidad virtual “permite la generación de entornos que rompan las restricciones habituales de espacio-tiempo, lo cual hace posible la generación de movimiento, intercambio y comunicación.” Esto supone que los movimientos realizados en el mundo real se recogen y trasladan mediante controles y sensores al mundo virtual. Y aunque el mundo virtual puede desobedecer las reglas físicas en la práctica sucede que cada limitación de movimiento en el mundo físico se traslada también al mundo virtual.
De modo que para una persona que usa silla de ruedas, que está postrado en una cama o que tiene un brazo inmovilizado o amputado, sus limitaciones para moverse libremente suponen un impedimento para moverse también libremente en entornos virtuales, lo que resulta en cierto modo contradictorio teniendo en cuenta las posibilidades que ofrece la realidad virtual. “El afán por recrear en un entorno virtual los movimientos corporales de forma realista y precisa está dejando fuera a las personas con discapacidades físicas”, dicen en Make.
Greg Bednarski ha desarrollado Walkin VR con el propósito de resolver esta incoherencia. El programa informático de Greg consiste en un asistente por software que permite a las personas con movilidad limitada o reducida hacer un uso de la realidad virtual sin que sus limitaciones corporales supongan un impedimento. Si bien plataformas de realidad virtual como SteamVR permiten realizar una serie de ajustes de configuración para adaptarse a las necesidades o preferencias del jugador —por ejemplo, cuando se utiliza un juego de realidad virtual en un espacio físico de tamaño reducido–, el “driver” Walkin VR mejora esta adaptación teniendo en cuenta además las limitaciones físicas del jugador.
Las plataformas de realidad virtual de consumo más completas, como las de Oculus, HTC Vive o PlayStation VR, constan de gafas de realidad virtual con diversos sensores de movimiento —para reconocer hacia dónde se dirige y hacia dónde mira el usuario— y con un par de controladores que se manejan con ambas manos, que introducen en el entorno virtual los movimientos del cuerpo y permiten interactuar con objetos irreales. El sistema también puede incorporar un sensor externo que capta desde fuera y de manera tridimensional los movimientos del usuario con precisión adicional a los movimientos registrados por los sensores incorporados en las gafas.
Un aspecto importante de Walkin VR es que no requiere ninguna modificación en los sistemas de realidad virtual ya existentes, ni tampoco hacer modificaciones en las aplicaciones o juegos. En cambio, el asistente utiliza diversas combinaciones de los controladores y de los sensores ya existentes para introducir en el entorno virtual movimientos que un jugador no puede realizar en el mundo físico. En este vídeo de ejemplo un usuario con un brazo inmovilizadopuede simular los movimientos del segundo controlador (el que manejaría con el brazo que tiene en cabestrillo) mediante movimientos hechos con la cabeza; el asistente modifica de este modo el entorno virtual para adaptarse a la persona que está en desventaja con el resto de jugadores, que no perciben esa adaptación personalizada.
En este otro vídeo una jugadora en silla de ruedas y con una limitación de movimiento en los brazos también puede hacer uso de otro juego que requiere desplazarse y levantar ambos brazos para desplazarse por el entorno computerizado, apuntar y disparar. En este caso el asistente Walkin VR compensa esa limitación haciendo un seguimiento del movimiento de los ojos a partir de los cuales simular en tiempo real el movimiento de los brazos. De nuevo se trata de un juego existente y sin modificar que el “driver” adapta a la limitación física de esa persona.
Aunque Walkin VR se puede adquirir como unos 30 euros todavía según Greg es un desarrollo en beta al que se le irán añadiendo opciones que amplíen las posibilidades de juego y de uso de la realidad virtual para personas con discapacidades físicas. Sin embargo, dicen en Road to VR, resolver este problema no debería ser solo la tarea de un programador: “los desarrolladores de aplicaciones y de juegos de realidad virtual deberían consensuar la manera de hacer que los juegos y las aplicaciones VR sean tan inclusivos como sea posible a todo tipo de jugadores.”
Presentaron mochila con lenguaje Constanz y localizador que emite un sonido cuando la persona silva o aplaude.
En el Perú existen cerca de 160,000 personas invidentes y casi 600,000 que tienen alguna discapacidad visual, condición que compromete su calidad de vida, desarrollo integral y bienestar familiar.
En ese contexto y pensando en las necesidades de la población con discapacidad visual – pero dirigido a todo tipo de usuarios – la compañía Totto presentó la Prisma Inn.
Esta es una mochila creada para personas con discapacidad visual, y cuenta con el lenguaje Constanz, un sistema de símbolos en relieve que permite a las personas identificar colores a través del tacto.
El código Constanz está inspirado en los elementos de la naturaleza: el amarillo se identifica con una línea recta en relieve, por la manera como los rayos del sol golpean directamente a la tierra. El azul es una línea ondulada y representa el fluir del agua.
El rojo tiene forma de zigzag, porque el fuego se mueve de forma irregular, y el blanco y el negro son, respectivamente, un aro y un punto. A partir de ahí, juntando las figuras, todas en relieve, se pueden formar los colores del círculo cromático.
En el Perú existen cerca de 160,000 personas invidentes y casi 600,000 que tienen alguna discapacidad visual, condición que compromete su calidad de vida, desarrollo integral y bienestar familiar.
En ese contexto y pensando en las necesidades de la población con discapacidad visual – pero dirigido a todo tipo de usuarios – la compañía Totto presentó la Prisma Inn.
Esta es una mochila creada para personas con discapacidad visual, y cuenta con el lenguaje Constanz, un sistema de símbolos en relieve que permite a las personas identificar colores a través del tacto.
El código Constanz está inspirado en los elementos de la naturaleza: el amarillo se identifica con una línea recta en relieve, por la manera como los rayos del sol golpean directamente a la tierra. El azul es una línea ondulada y representa el fluir del agua.
El rojo tiene forma de zigzag, porque el fuego se mueve de forma irregular, y el blanco y el negro son, respectivamente, un aro y un punto. A partir de ahí, juntando las figuras, todas en relieve, se pueden formar los colores del círculo cromático.