Tipos de Funciones de Transferencia
¿Que es una Funcion de Transferencia?
Es la forma básica de describir modelos matemáticos de sistemas lineales, basada en la transformada de Laplace que permite obtener la respuesta temporal, la respuesta estática y la respuesta en frecuencia .
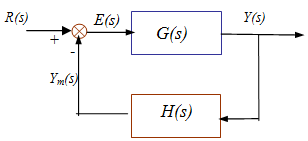
Al representar un sistema de control mediante un diagrama de bloques, se debe colocar en cada bloque la función de transferencia correspondiente al elemento del sistema.
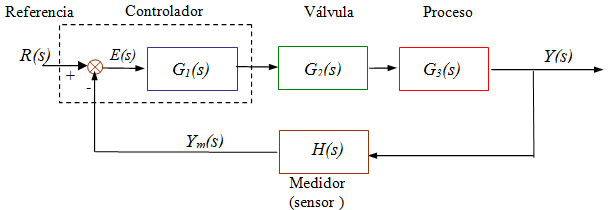
Para motivos didacticos, se reduce a:
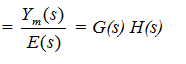
1.- FT Lazo Abierto.
La relación entre la señal de retroalimentación Ym(s) y la señal de error actuante E(s), se denomina función de transferencia de lazo abierto. Es decir:
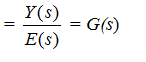
2.- FT Lazo Directo.
La relación entre la salida Y(s) y la señal de error actuante E(s) se denomina función de transferencia directa, de modo que:
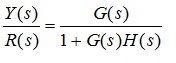
3.- FT Lazo Cerrado.
La salida Y(s) y la entrada R(s) están relacionadas como sigue:
Y(s) = G(s) E(s)
E(s) = R(s) – Ym(s)
= R(s) – H(s)
Eliminando E(s) de ésta ecuación se tiene
Y(s) = G(s) R(s) – H(s) Y(s)